public void CalculateFrustumCorners
(Rect viewport,
float z,
Camera.MonoOrStereoscopicEye eye,
Vector3[] outCorners);
Parameters
| viewport | 用于视锥体计算的标准化视口坐标。 |
| z | 从摄像机原点开始的 Z 深度(将在该位置计算四角)。 |
| eye | 要使用的摄像机眼投影矩阵。 |
| outCorners | 包含视锥体四角矢量的输出数组。不能为 null,且长度必须 >= 4。 |
Description
给定视口坐标,计算指向指定摄像机深度处视锥体四角的视图空间矢量。
用于有效地计算图像特效着色器中的像素在世界空间中的位置。请参阅全局雾效的标准资源实现。
using UnityEngine;
public class ExampleClass : MonoBehaviour
{
void Update()
{
// this example shows the different camera frustums when using asymmetric projection matrices (like those used by OpenVR).
var camera = GetComponent<Camera>();
Vector3[] frustumCorners = new Vector3[4];
camera.CalculateFrustumCorners(new Rect(0, 0, 1, 1), camera.farClipPlane, Camera.MonoOrStereoscopicEye.Mono, frustumCorners);
for (int i = 0; i < 4; i++)
{
var worldSpaceCorner = camera.transform.TransformVector(frustumCorners[i]);
Debug.DrawRay(camera.transform.position, worldSpaceCorner, Color.blue);
}
camera.CalculateFrustumCorners(new Rect(0, 0, 1, 1), camera.farClipPlane, Camera.MonoOrStereoscopicEye.Left, frustumCorners);
for (int i = 0; i < 4; i++)
{
var worldSpaceCorner = camera.transform.TransformVector(frustumCorners[i]);
Debug.DrawRay(camera.transform.position, worldSpaceCorner, Color.green);
}
camera.CalculateFrustumCorners(new Rect(0, 0, 1, 1), camera.farClipPlane, Camera.MonoOrStereoscopicEye.Right, frustumCorners);
for (int i = 0; i < 4; i++)
{
var worldSpaceCorner = camera.transform.TransformVector(frustumCorners[i]);
Debug.DrawRay(camera.transform.position, worldSpaceCorner, Color.red);
}
}
}
这些视锥体如下图所示: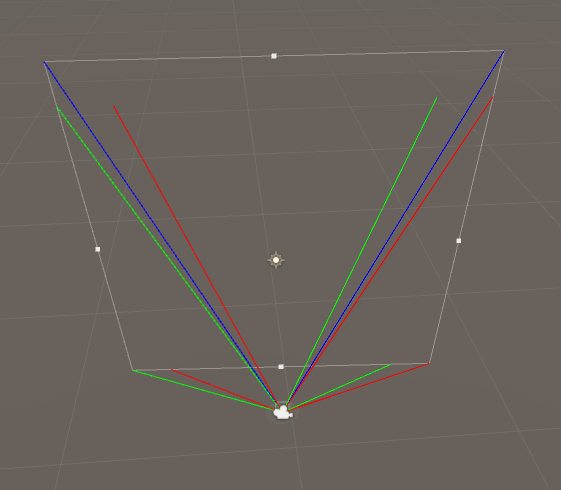 。
。